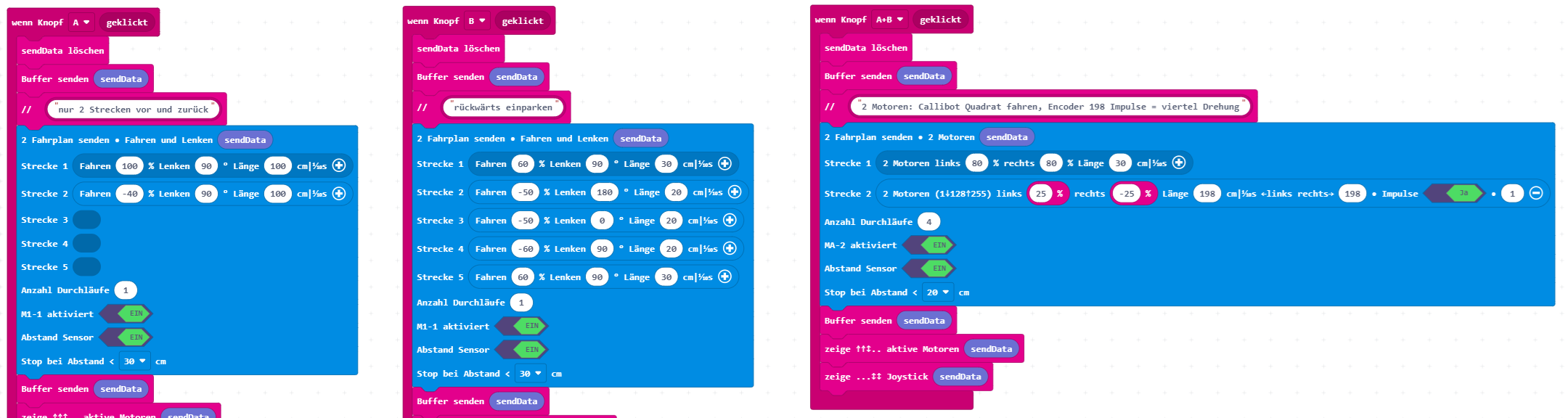
Oft sind es mehr Kinder, als "Roboter" zur Verfügung stehen. Aber jedes Kind hat einen Calliope. Mit MakeCode kann der "Fahrplan" programmiert und auf den eigenen Calliope (Sender) übertragen werden. Eine Strecke hat 3 Parameter: Fahren, Lenken und Länge. 5 Strecken können gleichzeitig programmiert und auf Knopfdruck zu einem Modell gesendet werden. So können Kinder nacheinander mit einem oder wenigen Robotern ihre Programme testen. Mehrere Modelle werden durch Funkgruppen unterschieden.
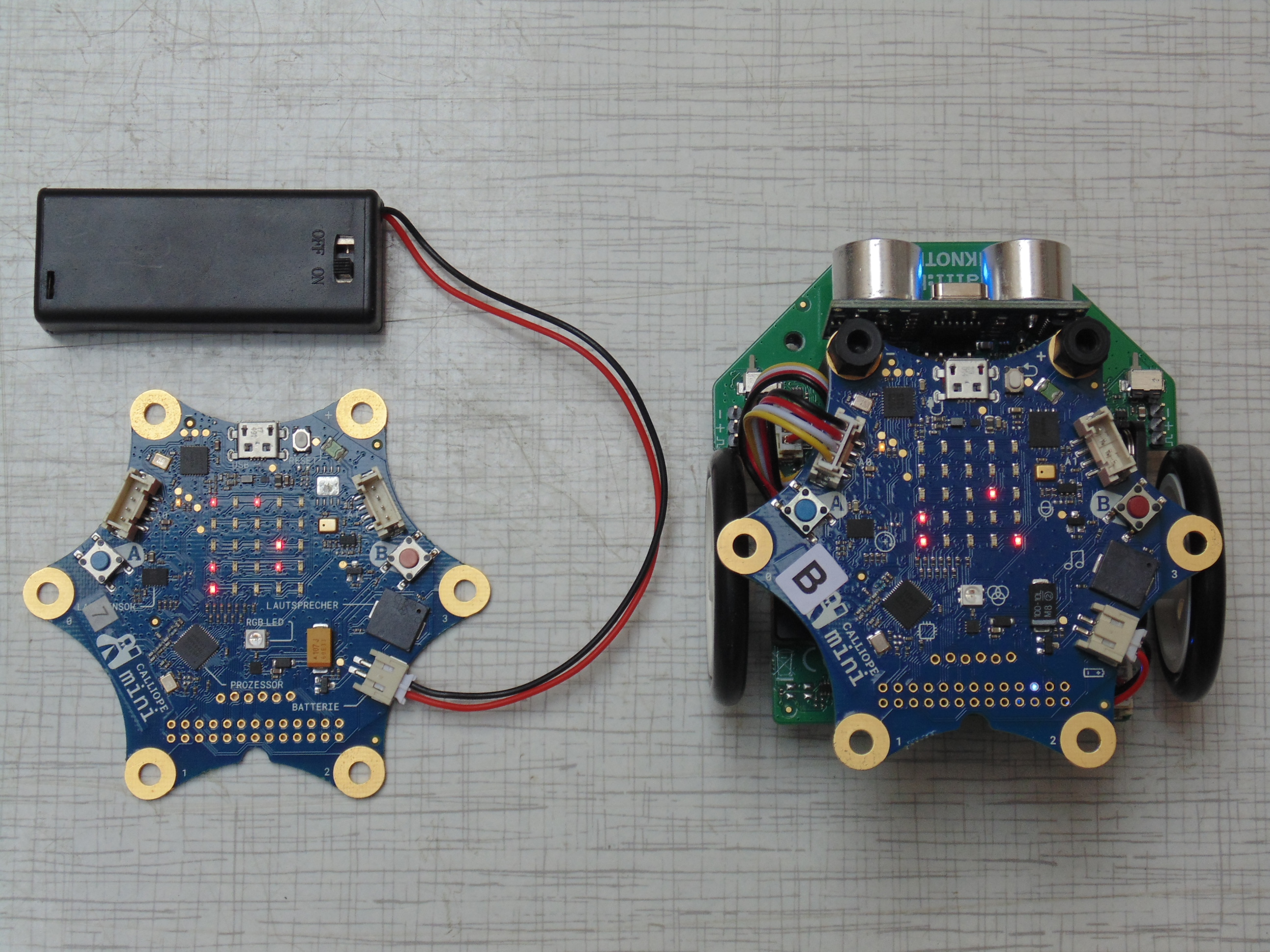
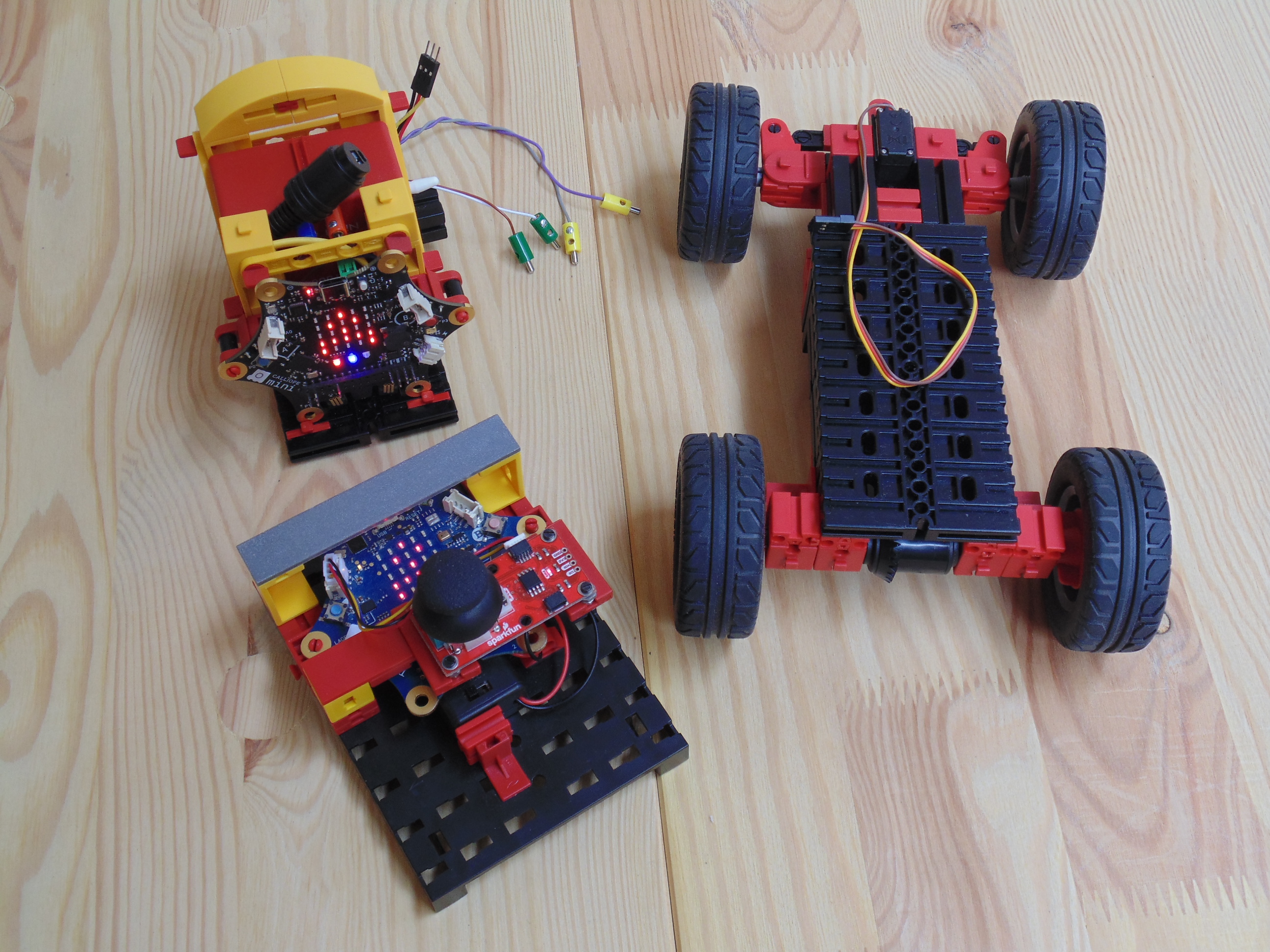
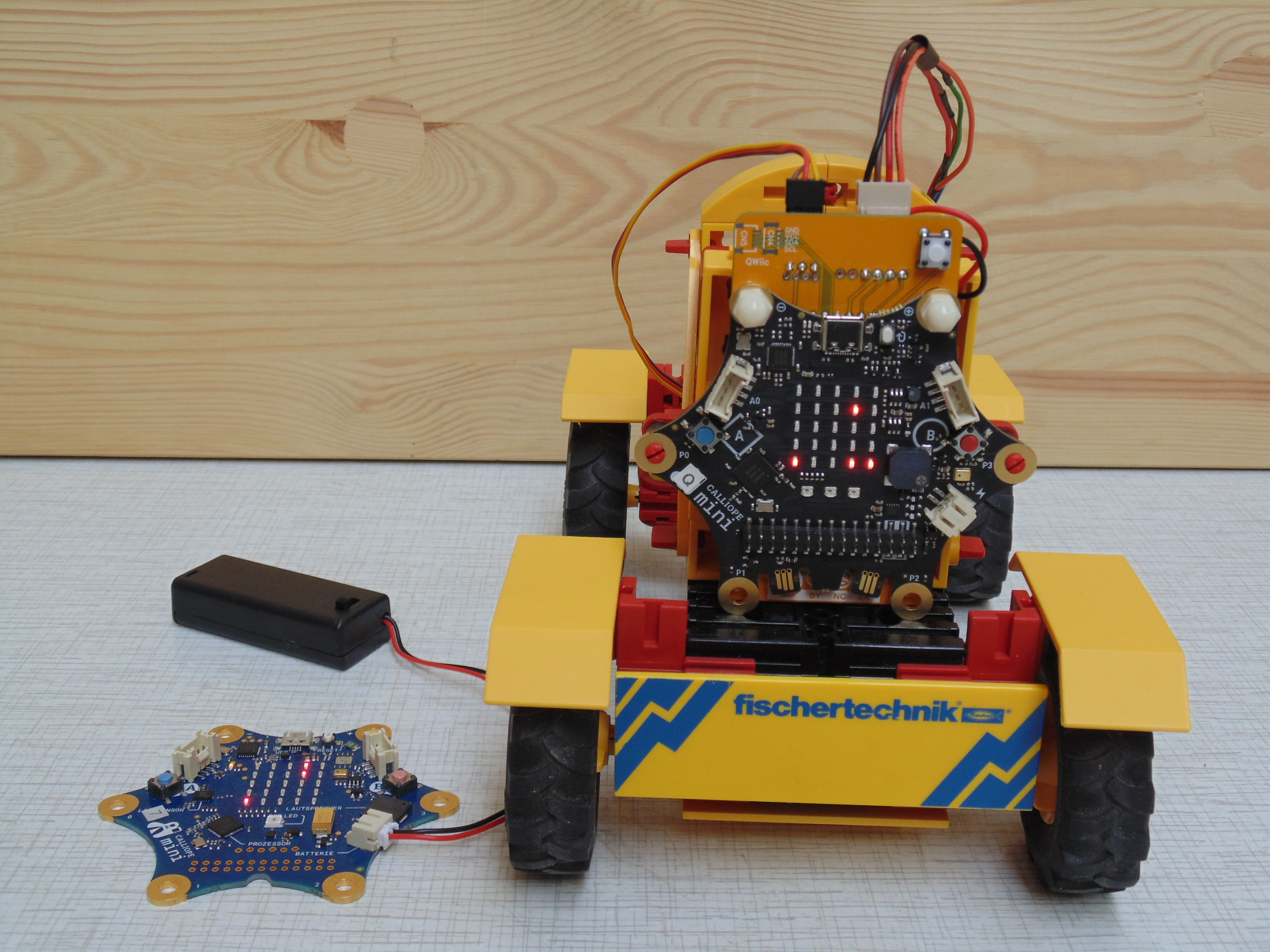
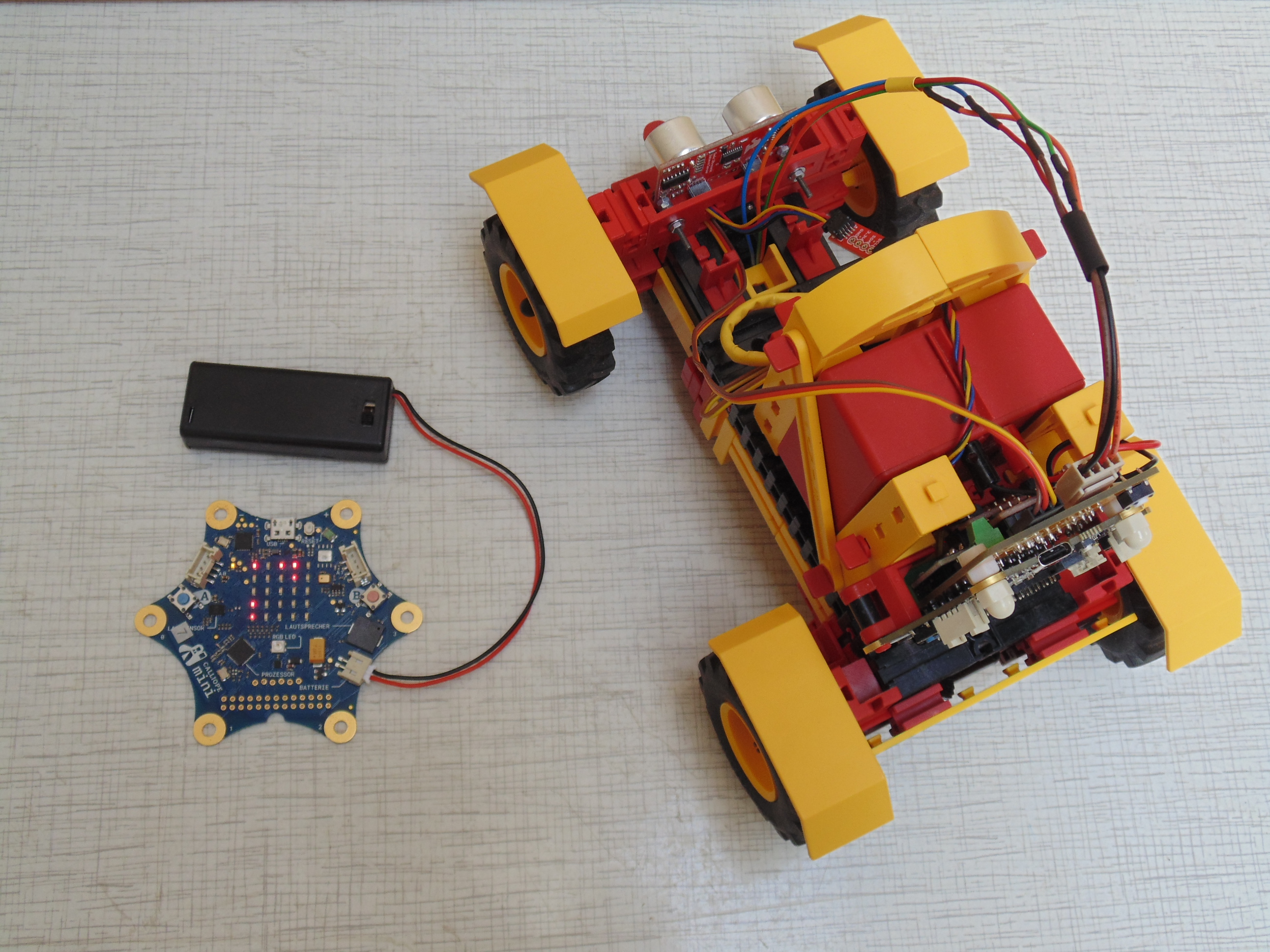
Das Modell wird ebenfalls von einem Calliope gesteuert, der die Fahrstrecken per Bluetooth empfängt und dann abfährt. Fast fertig montiert und in vielen Schulen vorhanden eignen sich dafür Calli:bot. Zum selber bauen können alle Bauanleitungen von fischertechnik mit Motor und Servo (oder 2 Motoren) nachgebaut und mit Calliope gesteuert werden. Als Controller dient ein Calliope mini v3 mit angesteckter Leiterplatte.
Das Referenz Modell ist Maker Kit Car. Es ist das erste Modell mit digitaler Bauanleitung. Maker Kit Car ist in einer Stunde gebaut, Calliope drauf gesteckt und fährt (mit Fernsteuerung). So macht Roboter bauen Spaß.
Die Leiterplatte wurde von mir entworfen und in Kooperation mit einem Mitglied im Calliope Forum produziert. Sie ist zum selber löten, kann aber auch bestückt geliefert werden. Der Preis für eine fertige Leiterplatte entspricht etwa dem Preis für einen neuen Calliope mini.
Die Software für Sender, Calli:bot und Empfänger mit der Leiterplatte ist in einer einzigen Erweiterung calliope-net/fernsteuerung enthalten und bei GitHub gespeichert. Damit ist auch die Fernsteuerung mit Joystick und 6 Motoren gleichzeitig über Bluetooth möglich. Als Sensoren werden Encoder, Spursensor, Ultraschall und Laser Distance Sensor unterstützt. Der Joystick kann übrigens an jeden vorhandenen Calliope (Sender) einfach an I²C angesteckt werden und schon ist die Fernbedienung fertig. In diesem Projekt hier geht es aber ohne Joystick.
Wenn ein Calli:bot und ein zweiter Calliope als Sender vorhanden sind, muss nur noch die Software herunter geladen werden.
Aufgabe in einem eigenen Fenster anzeigen
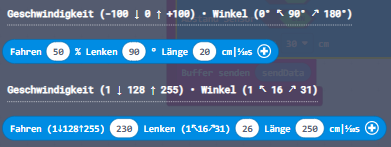
Fahren (Geschwindigkeit) 8 Bit 1..255 (0 ist ungültig) → 128 ist Stop (H-Bridge)
| rückwärts | stop | vorwärts | Fahren | |||||||
| -100% | -75% | -50% | -25% | 0% | +25% | +50% | +75% | +100% | Picker | |
| 1 | 32 | 64 | 96 | 128 | 159 | 191 | 223 | 255 | sendData | 8 Bit |
Lenken (Winkel) 5 Bit 1..31 (0 ist ungültig) → 3° Schritte am Servo Pin
| links | gerade | rechts | Lenken | |||||||||
| 0° | 18° | 36° | 54° | 72° | 90° | 108° | 126° | 144° | 162° | 180° | Picker | |
| 1 | 4 | 7 | 10 | 13 | 16 | 19 | 22 | 25 | 28 | 31 | sendData | 5 Bit |
| 135° | 126° | 117° | 108° | 99° | 90° | 81° | 72° | 63° | 54° | 45° | Servo Pin | |
Länge (Encoder Impulse)
Drehzahl fischertechnik Motoren bei 9 Volt im Leerlauf